Loading...
Searching...
No Matches
actuatordemo.c File Reference
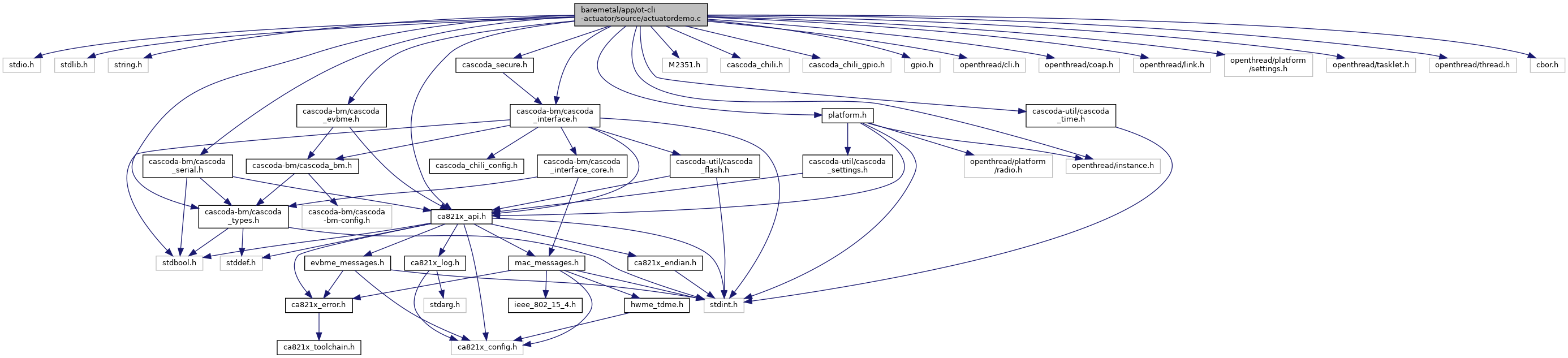
#include <stdio.h>#include <stdlib.h>#include <string.h>#include "cascoda-bm/cascoda_evbme.h"#include "cascoda-bm/cascoda_interface.h"#include "cascoda-bm/cascoda_serial.h"#include "cascoda-bm/cascoda_types.h"#include "cascoda-util/cascoda_time.h"#include "M2351.h"#include "ca821x_api.h"#include "cascoda_chili.h"#include "cascoda_chili_gpio.h"#include "cascoda_secure.h"#include "gpio.h"#include "openthread/cli.h"#include "openthread/coap.h"#include "openthread/instance.h"#include "openthread/link.h"#include "openthread/platform/settings.h"#include "openthread/tasklet.h"#include "openthread/thread.h"#include "platform.h"#include "cbor.h"
Include dependency graph for actuatordemo.c:
Classes | |
| struct | actuator_details |
Macros | |
| #define | ACTUATOR_BY_DEFAULT |
| #define | MAX_ACTUATORS 6 |
| #define | ACTUATOR_UART_BAUDRATE 115200 |
Enumerations | |
| enum | actuatordemo_state { ACTUATORDEMO_STOPPED = 0 , ACTUATORDEMO_ACTUATOR = 1 , ACTUATORDEMO_CONTROLLER = 2 } |
| enum | value_to_send { ACTUATOR_INFO = 0 , ACTUATOR_BRIGHTNESS = 1 , ACTUATOR_COLOUR_MIX = 2 , ACTUATOR_BOTH = 3 } |
Functions | |
| void | handle_cli_actuatordemo (void *aContext, uint8_t aArgsLength, char *aArgs[]) |
| Process a CLI command to change the state of the actuator demo. | |
| ca_error | init_actuatordemo (otInstance *aInstance, struct ca821x_dev *pDeviceRef) |
| Initialise the actuator demo. | |
| ca_error | handle_actuatordemo (struct ca821x_dev *pDeviceRef) |
| Handle all actuatordemo functionality. | |
Variables | |
| const char * | uriCascodaDiscover = "ca/di" |
| const char * | uriCascodaActuatorDiscoverQuery = "t=act" |
| const char * | uriCascodaActuator = "ca/ac" |
| const char * | uriCascodaKeepAlive = "ca/ka" |
| enum actuatordemo_state | actuatordemo_state = ACTUATORDEMO_STOPPED |
| struct actuator_details | actuators [MAX_ACTUATORS] |
| int64_t | brightness = 0 |
| int64_t | colour_mix = 0 |
Macro Definition Documentation
◆ ACTUATOR_BY_DEFAULT
| #define ACTUATOR_BY_DEFAULT |
◆ ACTUATOR_UART_BAUDRATE
| #define ACTUATOR_UART_BAUDRATE 115200 |
◆ MAX_ACTUATORS
| #define MAX_ACTUATORS 6 |
Enumeration Type Documentation
◆ actuatordemo_state
| enum actuatordemo_state |
◆ value_to_send
| enum value_to_send |
Function Documentation
◆ handle_actuatordemo()
| ca_error handle_actuatordemo | ( | struct ca821x_dev * | pDeviceRef | ) |
Handle all actuatordemo functionality.
Should be called regularly by the program main loop.
- Parameters
-
pDeviceRef - Pointer to initialised ca821x_device_ref struct.
- Returns
- CA_ERROR_SUCCESS for success.
◆ handle_cli_actuatordemo()
| void handle_cli_actuatordemo | ( | void * | aContext, |
| uint8_t | aArgsLength, | ||
| char * | aArgs[] | ||
| ) |
Process a CLI command to change the state of the actuator demo.
Should be linked to the openthread CLI using otCliSetUserCommands.
◆ init_actuatordemo()
| ca_error init_actuatordemo | ( | otInstance * | aInstance, |
| struct ca821x_dev * | pDeviceRef | ||
| ) |
Initialise the actuator demo.
Should be called once at program startup.
- Parameters
-
aInstance - Pointer to an OpenThread instance. pDeviceRef - Pointer to initialised ca821x_device_ref struct.
- Returns
- CA_ERROR_SUCCESS for success.
Variable Documentation
◆ actuatordemo_state
◆ actuators
| struct actuator_details actuators[MAX_ACTUATORS] |
◆ brightness
| int64_t brightness = 0 |
◆ colour_mix
| int64_t colour_mix = 0 |
◆ uriCascodaActuator
| const char* uriCascodaActuator = "ca/ac" |
◆ uriCascodaActuatorDiscoverQuery
| const char* uriCascodaActuatorDiscoverQuery = "t=act" |
◆ uriCascodaDiscover
| const char* uriCascodaDiscover = "ca/di" |
◆ uriCascodaKeepAlive
| const char* uriCascodaKeepAlive = "ca/ka" |