Loading...
Searching...
No Matches
actuatordemo.h File Reference
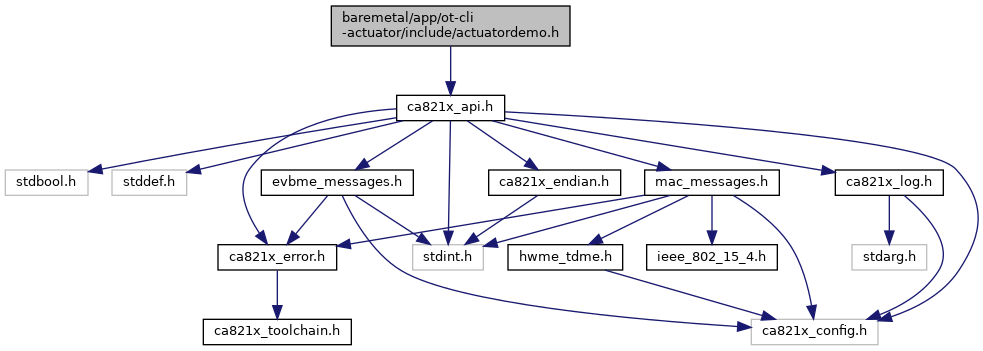
#include "ca821x_api.h"
Include dependency graph for actuatordemo.h:
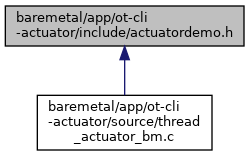
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| void | handle_cli_actuatordemo (void *aContext, uint8_t aArgsLength, char *aArgs[]) |
| Process a CLI command to change the state of the actuator demo. | |
| ca_error | init_actuatordemo (otInstance *aInstance, struct ca821x_dev *pDeviceRef) |
| Initialise the actuator demo. | |
| ca_error | handle_actuatordemo (struct ca821x_dev *pDeviceRef) |
| Handle all actuatordemo functionality. | |
Function Documentation
◆ handle_actuatordemo()
| ca_error handle_actuatordemo | ( | struct ca821x_dev * | pDeviceRef | ) |
Handle all actuatordemo functionality.
Should be called regularly by the program main loop.
- Parameters
-
pDeviceRef - Pointer to initialised ca821x_device_ref struct.
- Returns
- CA_ERROR_SUCCESS for success.
◆ handle_cli_actuatordemo()
| void handle_cli_actuatordemo | ( | void * | aContext, |
| uint8_t | aArgsLength, | ||
| char * | aArgs[] | ||
| ) |
Process a CLI command to change the state of the actuator demo.
Should be linked to the openthread CLI using otCliSetUserCommands.
◆ init_actuatordemo()
| ca_error init_actuatordemo | ( | otInstance * | aInstance, |
| struct ca821x_dev * | pDeviceRef | ||
| ) |
Initialise the actuator demo.
Should be called once at program startup.
- Parameters
-
aInstance - Pointer to an OpenThread instance. pDeviceRef - Pointer to initialised ca821x_device_ref struct.
- Returns
- CA_ERROR_SUCCESS for success.